Активные движущие силы и способ их задания
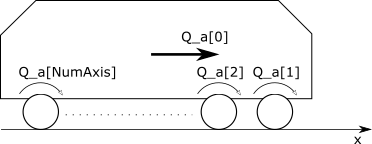
В RRS, чтобы заставить локомотив двигаться, необходимо подать на его колесные пары крутящий момент. В классе Vehicle существует специальная переменная Q_a, которая носит название вектор обобщенных активных сил. Этот вектор хранит NumAxis + 1 значений, а если вы помните, то NumAxis определяется в конфиге локомотива как число его осей.
Значение Q_a[0] описывает линейную силу, приложенную к кузову подвижной единицы, а значения с Q_a[1] по Q_a[NumAxis] — как раз таки крутящие моменты, приложенный к колесным парам, с номерами от 1 до NumAxis, от тягового привода.
Для чего нужна линейная сила Q_a[0]. Например, у вас появится желание сделать модель поезда с реактивной тягой (а такой поезд реально испытывался на отечественной железной дороге и кабину его вагона с реактивными двигателями можно увидеть в качестве памятника перед главной проходной Тверского вагоностроительного завода). Вот тогда нам потребуется передача активного тягового усилия через кузов. Через этот параметр можно передавать различные тестовые усилия. В обычных условиях он равен нулю и не используется, но кто знает для каких целей он может понадобится разработчику…
Стоит подать на колесные пары крутящий момент отличный от нуля, и наш локомотив поедет. Попробуем это реализовать.
Для начала переопределим в классе SimpleLoco метод step() вызываемый движком на каждом шаге интегрирования модели поезда. В нем происходит основная работа по вычислению параметров, обеспечивающих движение подвижного состава.
private:
/// Заданный уровень тягового усилия
double ref_traction_level;
/// Обработка нажатия клавиш
void keyProcess();
/// Шаг моделирования систем локомотива
void step(double t, double dt);
};В качестве параметров этот метод принимает от движка игры текущее время симуляции t и текущий шаг интегрирования по времени dt. Эти параметры необходимы нам для описания процессов, происходящих в подвижном составе, так как все процессы в оборудовании разворачиваются во времени, и движок любезно предоставляет нам все параметры отсчета времени, актуальные на данный момент. Реализуем метод step() написав такой код
void SimpleLoco::step(double t, double dt)
{
double torque = 5000.0;
for (size_t i = 1; i < Q_a.size(); ++i)
{
Q_a[i] = ref_traction_level * torque;
}
}
Что мы сделали? Мы задали некоторый постоянный момент torque равный 5000 Н · м, и приложили к каждой колесной паре нашего локомотива, с учетом текущего заданного уровня тяги, которым мы управляем с клавиатуры. Компилируем библиотеку, запускаем симулятор и теперь мы увидим, как наш локомотив, повинуясь командам с клавиатуры берет разбег и начинает движение!
Тяговая характеристика локомотива
Все что мы проделали конечно замечательно, но мы приняли очень грубое допущение о постоянстве крутящего момента, прикладываемого к колесной паре. На самом деле это не так, и этот момент определяется не только тем, какой уровень тягового усилия мы задали, но зависит от текущей скорости движения.
Тяговая характеристика локомотива - кривая, задающая зависимость силы тяги, реализуемой локомотивом от его скорости и различного рода ограничений (по сцеплению и по мощности, развиваемой приводом)
Типичная тяговая характеристика может выглядеть так, как показано на рисунке ниже
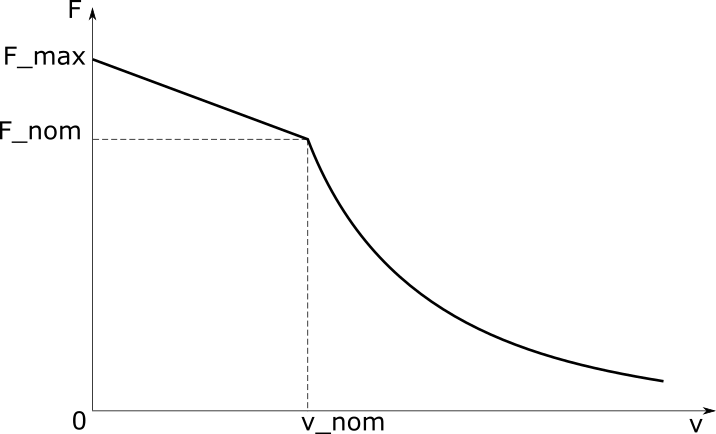
Идеальная тяговая характеристика имеет форму гиперболы, и на данном графике вторая половина кривой имеет гиперболическую форму. Почему? Потому, что любой тяговый привод имеет ограниченную мощность - никакой двигатель не в состоянии выдать мощность более той, на которую он рассчитан. Скажем, тяговые двигатели локомотива суммарно обеспечивают мощность равную P_nom. А мощность, как известно, определяется как произведение силы тяги на скорость
P_nom = F · v
Тогда максимальная сила тяги, которую может реализовать локомотив при данной мощности может быть вычислена так
F = P_nom / v
то есть сила тяги обратно пропорциональна скорости. Поэтому, для наиболее полного использования мощности привода все локомотивы имеют гиперболическую или близкую к ней форму тяговой характеристики.
Однако, кроме ограничения по мощности есть еще ограничения по сцеплению колес с рельсами и по электрическим параметрам тяговых машин, что не дает возможность реализовать большую тягу, даже при достаточной мощности привода. Это ограничение (очень условно) можно выразить в виде наклонной прямой, из которой состоит первая половина графика.
Теперь, зная все это, скорректируем код нашего локомотива, чтобы реализовать правильную форму его тяговой характеристики. Введем в наш класс ряд параметров
private:
/// Заданный уровень тягового усилия
double ref_traction_level;
/// Максимальная реализуемая сила тяги, кН
double F_max;
/// Номинальная сила тяги (соотвествующая продолжительной мощности), кН
double F_min;
/// Номинальная скорость (соотвествующая часовой мощности), км/ч
double V_nom;
Инициализируем эти переменные некими значениями, соответствующими приближенно тяговой характеристики, типичной для реальных локомотивов
SimpleLoco::SimpleLoco(QObject *parent) : Vehicle (parent)
, ref_traction_level(0.0)
, F_max(450.0)
, F_min(350.0)
, V_nom(80.0)
{
}
Теперь реализуем в классе приватный метод, вычисляющий силу тяги в зависимости от скорости
double SimpleLoco::trac_char(double v)
{
// Переводим номинальную скорость в м/с
double v_nom = V_nom / Physics::kmh;
double traction_force = 0;
// Вычисляем силу тяги, в зависимости от величины
// текущей скорости по отношению к номинальной.
// Учитываем, что параметры заданной характеристики мы брали в кН,
// а движку требуются величины в системе СИ, поэтому домножаем на 1000
// переводя килоньютоны в ньютоны
if (abs(v) < v_nom)
{
traction_force = (F_max + (F_nom - F_max) * abs(v) / v_nom) * 1000.0;
}
else
{
traction_force = F_nom * v_nom * 1000.0 / v;
}
return traction_force;
}
Теперь у нас есть функция, позволяющая рассчитать силу тяги, которую может развить локомотив при данной скорости. Но это еще не всё - в методе step() пишем следующий код
void SimpleLoco::step(double t, double dt)
{
// Вычисляем силу тяги, которую реализует локомотив в данный момент
double trac_force = ref_traction_level * trac_char(velocity);
// Вычисляем момент, приходящийся на одну колесную пару
double torque = trac_force * wheel_diameter / 2.0 / num_axis;
// Задаем момент каждой колесной паре
for (size_t i = 1; i < Q_a.size(); ++i)
{
Q_a[i] = torque;
}
}
Поясню этот код. Во-первых, локомотив выдает тягу не максимальной величины, а в зависимости от того уровня, который мы задали клавишами, поэтому величину, получаемую из тяговой характеристики мы умножаем на этот уровень.
Во-вторых, на колесные пары мы подаем момент, реализуемый приводом этой колесной пары, а тяговая характеристика дает полную тягу локомотива. Поэтому эту полную тягу следует пересчитать в момент приходящийся на одну КП. Для этого всю тягу мы делим на число осей, а потом умножаем на радиус колеса, так как момент приложенный к КП и сила тяги, приходящаяся на эту ось находятся в соотношении
Mкп = Fкп · rколеса
Радиус колеса мы можем вычислить как половина диаметра, используя стандартную переменную wheel_diameter, в которой хранится диаметр колеса, заданный нами через конфиг. Аналогично, число осей локомотива хранится в переменной num_axis.
Теперь, если мы запустим симулятор и дадим тягу, то увидим, как наш локомотив разгоняется, причем довольно шустро. Выведем на экран, через отладочную строку несколько дополнительных параметров, для чего перенесем инициализацию отладочной строки в метод step()
void SimpleLoco::step(double t, double dt)
{
// Вычисляем силу тяги, которую реализует локомотив в данный момент
double trac_force = ref_traction_level * trac_char(velocity);
// Вычисляем момент, приходящийся на одну колесную пару
double torque = trac_force * wheel_diameter / 2.0 / num_axis;
// Задаем момент каждой колесной паре
for (size_t i = 1; i < Q_a.size(); ++i)
{
Q_a[i] = torque;
}
DebugMsg = QString("Время: %1 с Зад. тяга: %2 Скорость: %3 км/ч Сила тяги: %4 кН")
.arg(t, 10, 'f', 1)
.arg(ref_traction_level, 4, 'f', 2)
.arg(velocity * Physics::kmh, 6, 'f', 2)
.arg(trac_force / 1000.0, 6, 'f', 1);
}
Теперь внизу, в отладочной строке, можно увидеть, как меняется сила тяги по мере разгона, в точном соответствии с заданной нами характеристикой.